
Inhalt:
![]() Forscher der University of Cambridge haben in einer Pressemitteilung eine kostengünstige und energiesparende Roboterhand vorgestellt, die einige Objekte greifen kann und sie nicht fallen lässt. Um das zu erreichen, nutzt die Hand die Bewegung des Handgelenks und das „Gefühl in der Haut“. Objekte in unterschiedlicher Größe, Form und Textur zu greifen, ist für Menschen einfach, für Roboter jedoch noch eine sehr große Herausforderung. Die flexible, 3D-gedruckte Roboterhand der Forscher soll, obwohl sie nicht in der Lage ist, Finger unabhängig zu bewegen, dennoch einige komplexe Bewegungen ausführen können. Die Roboterhand kann Objekte greifen und vorhersagen, ob sie sie fallen lassen würde, indem sie die Informationen nutzt, die die Sensoren auf ihrer „Haut“ liefern. Diese passive Art der Bewegung erlaubt es Anwendern, den Roboter einfacher zu steuern und macht ihn energieeffizienter als Roboter mit vollmotorisierten Fingern.
Forscher der University of Cambridge haben in einer Pressemitteilung eine kostengünstige und energiesparende Roboterhand vorgestellt, die einige Objekte greifen kann und sie nicht fallen lässt. Um das zu erreichen, nutzt die Hand die Bewegung des Handgelenks und das „Gefühl in der Haut“. Objekte in unterschiedlicher Größe, Form und Textur zu greifen, ist für Menschen einfach, für Roboter jedoch noch eine sehr große Herausforderung. Die flexible, 3D-gedruckte Roboterhand der Forscher soll, obwohl sie nicht in der Lage ist, Finger unabhängig zu bewegen, dennoch einige komplexe Bewegungen ausführen können. Die Roboterhand kann Objekte greifen und vorhersagen, ob sie sie fallen lassen würde, indem sie die Informationen nutzt, die die Sensoren auf ihrer „Haut“ liefern. Diese passive Art der Bewegung erlaubt es Anwendern, den Roboter einfacher zu steuern und macht ihn energieeffizienter als Roboter mit vollmotorisierten Fingern.
Das anpassungsfähige Design könnte bei der Entwicklung kostengünstiger Robotik verwendet werden, die zu natürlicheren Bewegungen fähig ist und lernen kann, eine Vielzahl von Objekten zu greifen. Die Ergebnisse ihrer Arbeit haben die Forscher in einem Artikel mit dem Titel „Predictive Learning of Error Recovery with a Sensorized Passivity-Based Soft Anthropomorphic Hand“ in der Fachzeitschrift Advanced Intelligent Systems veröffentlicht.
Greifen lernen

Damit eine Bewegung in der Natur gelingt, müssen Hirn und Körper zusammenspielen. Die meisten modernen Roboter sind jedoch nicht in der Lage, so etwas so einfach durchzuführen. Menschen lernen instinktiv, wie viel Kraft sie aufwenden müssen, um ein Ei aufzuheben. Im Bio-Inspired Robotics Laboratory von Professor Fumiya Iida am Department of Engineering von Cambridge haben Forscher Lösungen entwickelt, mit denen der Roboter derartige Bewegungen mit dem richtigen Maß an Kraft, Druck und Energie lernen kann. Die 3D-gedruckte Roboterhand kann einige Objekte mit dem richtigen Druck und minimalem Energieaufwand greifen.
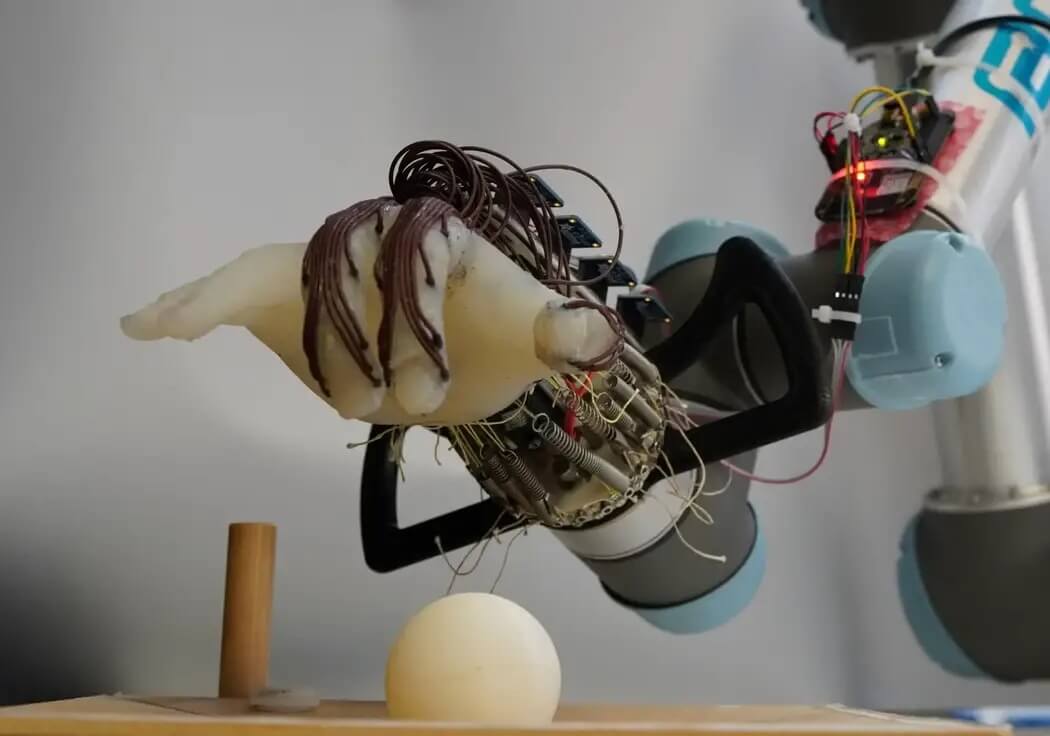
Die Forscher verwendeten eine 3D-gedruckte anthropomorphe Hand, in die sie taktile Sensoren implantierten. So konnte die Hand spüren, was sie berührte. Die Hand war nur zu passiven, handgelenksbasierten Bewegungen fähig. In 1200 Tests beobachteten die Forscher, wie die Roboterhand arbeitete. Der Roboter wurde zunächst mit kleinen 3D-gedruckten Plastikkugeln trainiert und ergriff sie mit einer vordefinierten Aktion, die durch menschliche Demonstrationen erhalten wurde.
Co-Autor Dr. Thomas George-Thuruthel sagte:
„In früheren Experimenten hat unser Labor gezeigt, dass es möglich ist, einen erheblichen Bewegungsbereich in einer Roboterhand zu erreichen, indem man einfach das Handgelenk bewegt. Wir wollten sehen, ob eine auf passiver Bewegung basierende Roboterhand nicht nur Objekte greifen kann, sondern auch vorhersagen kann, ob sie die Objekte fallen lassen wird oder nicht, und sich entsprechend anpassen kann.“
Erstautor Dr. Kieran Gilday sagte:
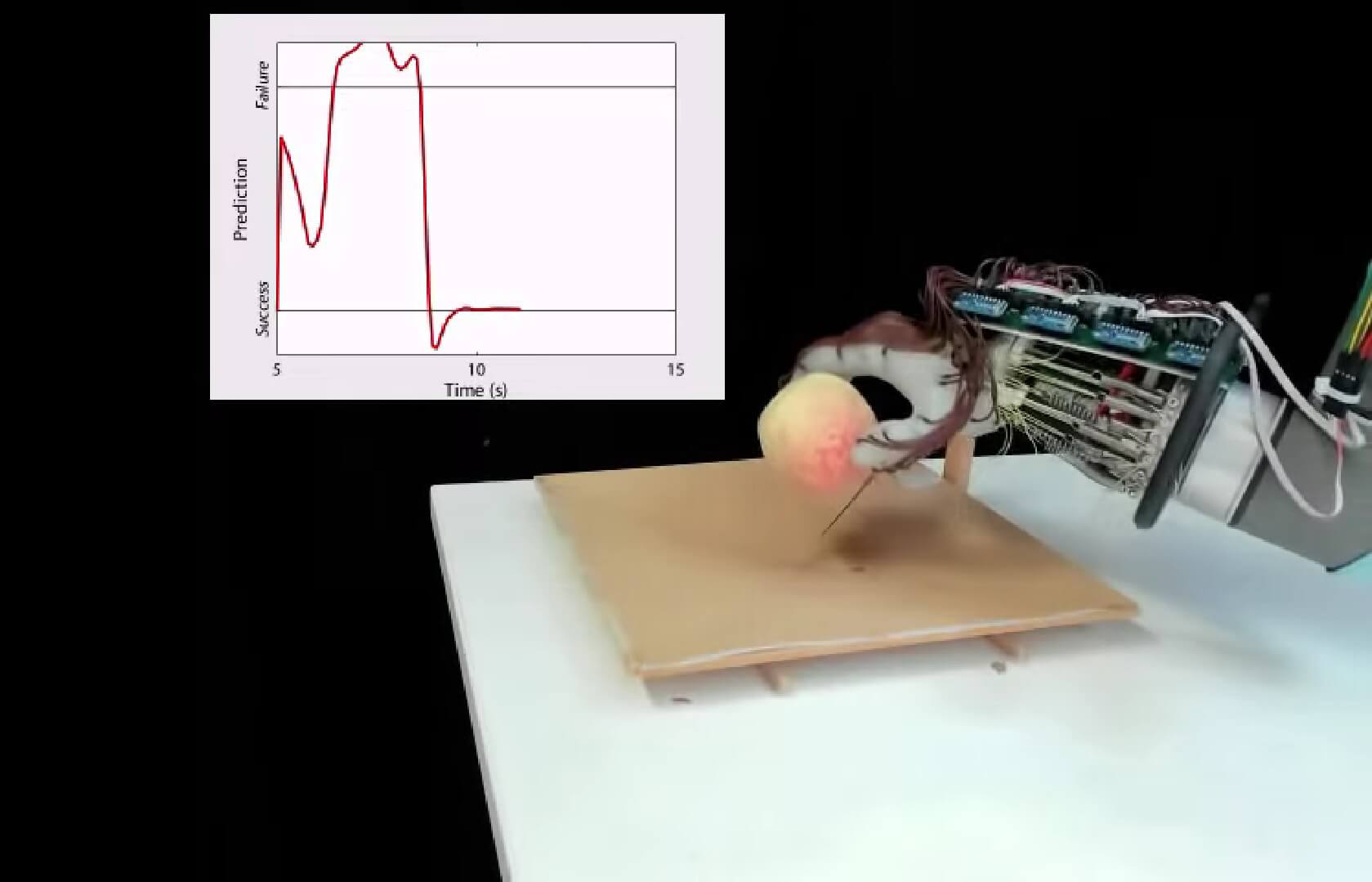
„Diese Art von Hand hat eine gewisse Federkraft: Sie kann Dinge selbst ohne Betätigung der Finger aufheben. Die taktilen Sensoren geben dem Roboter ein Gefühl dafür, wie gut der Griff funktioniert, sodass er weiß, wann er beginnt zu rutschen. Das hilft ihm vorherzusagen, wann etwas scheitern wird.“
George-Thuruthel sagte, dass die Sensoren unter der Haut den Druck messen. Die Forscher können nicht genau sagen, welche Informationen er dann erhält, aber es lässt sich abschätzen, wo und mit welcher Kraft das Objekt gegriffen wurde. Der Roboter lernt, dass eine Kombination aus einer bestimmten Bewegung und einem bestimmten Satz von Sensordaten zum Versagen führt, was ihn zu einer anpassbaren Lösung macht.
Iida sagte:
„Der große Vorteil dieses Designs ist der Bewegungsbereich, den wir ohne die Verwendung von Aktuatoren erreichen können. Wir wollen die Hand so weit wie möglich vereinfachen. Wir können viele gute Informationen und ein hohes Maß an Kontrolle ohne Aktuatoren erhalten, sodass wir, wenn wir sie hinzufügen, ein komplexeres Verhalten in einem effizienteren Paket erhalten.“
Einsatzmöglichkeiten
Neben der erforderlichen Energiemenge ist eine vollständig betätigte Roboterhand auch ein komplexes Steuerungsproblem. Das passive Design der von Cambridge entworfenen Hand mit einer kleinen Anzahl von Sensoren ist einfacher zu steuern, bietet einen großen Bewegungsbereich und rationalisiert den Lernprozess. Das System könnte unterschiedlich erweitert werden. Möglichkeiten wären Computer-Vision-Funktionen oder durch Lehren des Roboters, seine Umgebung auszunutzen, wodurch er eine größere Auswahl an Objekten erfassen könnte.
Roboterhand lernt, Dinge nicht fallenzulassen
Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.





