![]() Charbel Dalely Tawk vom ARC Centre of Excellence for Electromaterials Science hat an der Universität von Wollongong weiche, pneumatische Sensorkammern (SPSCs) aus einem 3D-Drucker vorgestellt. Inspiriert wurde er dazu von weichen, angetriebenen Bewegungssystemen, die mit Luft, Wasser, Strom, Wärme oder Licht betrieben werden, sogenannter Soft Robotics. Zu Demonstrationszwecken spielte er auf einem 3D-gedruckten SPSC-Piano passend für Weihnachten das klassische Jingle Bells, wie ein Onlineartikel berichtet. Vor wenigen Tagen haben wir die Arbeit von Forschern der School of Engineering der Deakin University in Australien präsentiert, die einen Artikel zum Thema „Closed-loop 4D-printed soft robots“ veröffentlicht haben.
Charbel Dalely Tawk vom ARC Centre of Excellence for Electromaterials Science hat an der Universität von Wollongong weiche, pneumatische Sensorkammern (SPSCs) aus einem 3D-Drucker vorgestellt. Inspiriert wurde er dazu von weichen, angetriebenen Bewegungssystemen, die mit Luft, Wasser, Strom, Wärme oder Licht betrieben werden, sogenannter Soft Robotics. Zu Demonstrationszwecken spielte er auf einem 3D-gedruckten SPSC-Piano passend für Weihnachten das klassische Jingle Bells, wie ein Onlineartikel berichtet. Vor wenigen Tagen haben wir die Arbeit von Forschern der School of Engineering der Deakin University in Australien präsentiert, die einen Artikel zum Thema „Closed-loop 4D-printed soft robots“ veröffentlicht haben.
Inhalt:
Soft Pneumatic Sensing Chambers (SPSCs)
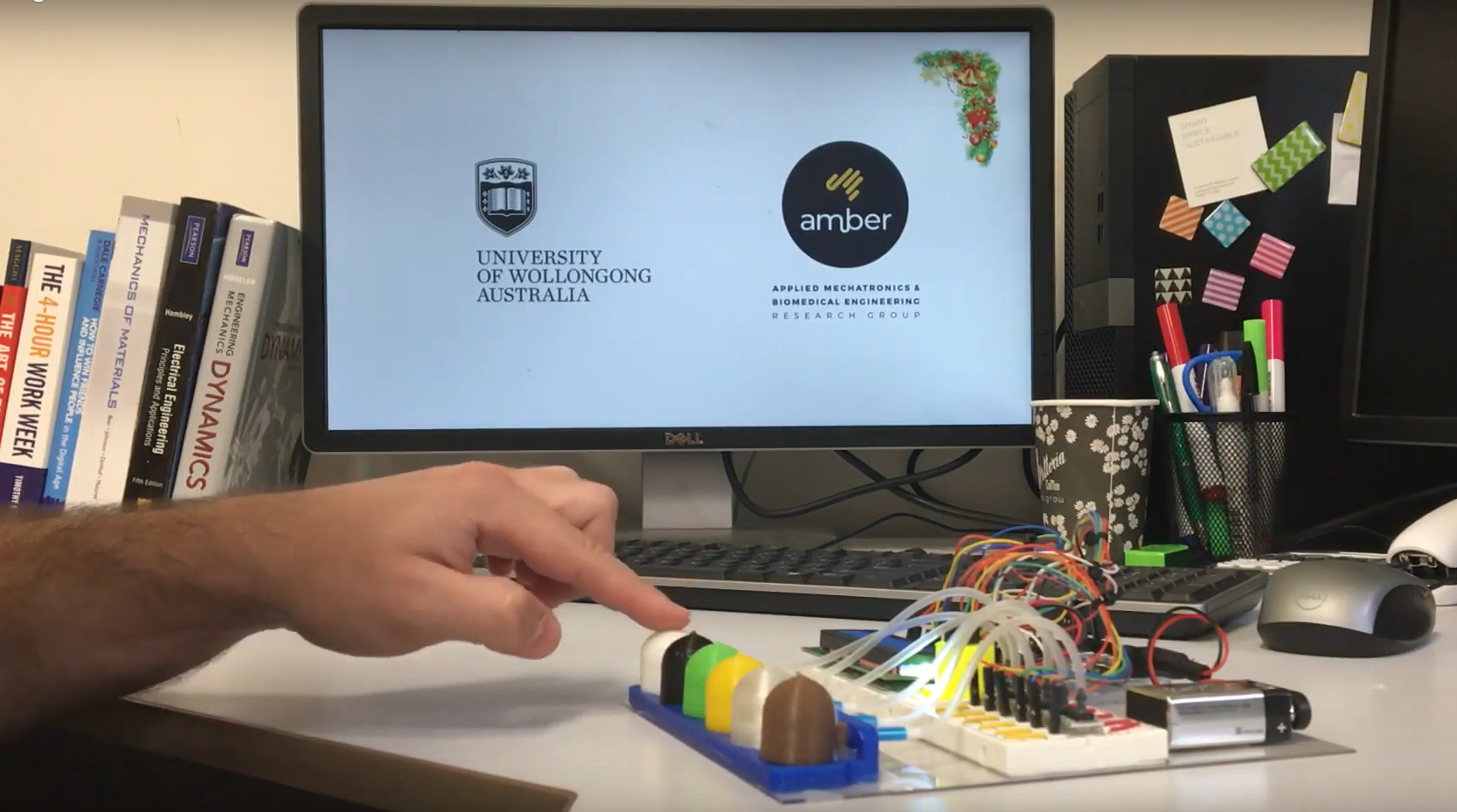
Die auf einem Desktop-3D-Drucker hergestellten SPSCs sind aus thermoplastischem Polyurethan (TPU) und reagieren auf Kompression, Biegung, Torsion und geradlinige Verschiebung. Das führt zu Druckänderungen in den SPSCs, was wiederum Aktionen auslöst. Beim SPSC-Piano ist die Aktion ein bestimmter Ton.
Weiche pneumatische Sensoren reagieren schnell, sind zuverlässig, haben einen geringen Stromverbrauch und eine lange Lebensdauer. Sie benötigen weniger Platz als für Soft Robotics Systeme erforderliche Blasen. Sie brauchen auch keine teuren leitfähigen Tinten, kein Trägermaterial und keine Nachbearbeitung. Dadurch geschieht die Herstellung schnell und effizient.
Im Vergleich zur herkömmlichen starren Robotik ist der Umgang mit weicher Robotik sicherer. Bei Kollisionen mit Hartmetallen und Verbundwerkstoffen steigt das Verletzungsrisiko. Weiche Roboterbestandteile wie Roboterarme sind da deutlich risikoärmer und geschickter, denn sie können an mehreren Punkten gebogen werden.
Handschuh mit Sensoren für AR- und VR-Systeme
Sie entwickelten einige Variationen der Sensoren wie einen Handschuh. Der Träger des Handschuhs kann die Position jedes seiner Finger verfolgen und visualisieren. Der Handschuh wird dann mit einem weichen Dreifinger-Robotergreifer verbunden, der vom Träger des Handschuhs direkt gesteuert werden konnte. Solch ein System eignet sich für Virtual Reality – und Augmented Reality – Umgebungen. Ein entwickelter Soft-Joystick eignet sich außerdem für Spieleanwendungen, interaktive Roboterplattformen für die MINT-Ausbildung, in Haptikgeräten für die Rehabilitation und mehr. Das Ergebnis seiner Entwicklung hielt er in einer Arbeit fest, die er in der Wiley Online Library unter dem Titel „Soft Pneumatic Sensing Chambers for Generic and Interactive Human–Machine Interfaces“ veröffentlicht hat.
Jingle Bells auf dem SPSC Piano
Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.





