
Inhalt:
![]() Forscher von Disney Research haben Roboter entwickelt, der mit möglichst realistischen Bewegungen und Reaktionen mit Menschen interagieren soll. Für die Umsetzung fertigten sie eine größtenteils 3D-gedruckte hautlose, humanoide animatronische Büste. Bei ihrer Idee standen sie vor der Herausforderung, die richtigen Blickinteraktionen auszulösen und diese gleichzeitig vom Roboter interpretiert zu bekommen. Es galt eine Interaktion zu schaffen, wie sie im echten Leben geschieht. 2019 haben Forscher der ETH Zürich einen Roboterhund entwickelt, der nach einer kurzen Einschulung selbstständig Schlittschuhlaufen lernt.
Forscher von Disney Research haben Roboter entwickelt, der mit möglichst realistischen Bewegungen und Reaktionen mit Menschen interagieren soll. Für die Umsetzung fertigten sie eine größtenteils 3D-gedruckte hautlose, humanoide animatronische Büste. Bei ihrer Idee standen sie vor der Herausforderung, die richtigen Blickinteraktionen auszulösen und diese gleichzeitig vom Roboter interpretiert zu bekommen. Es galt eine Interaktion zu schaffen, wie sie im echten Leben geschieht. 2019 haben Forscher der ETH Zürich einen Roboterhund entwickelt, der nach einer kurzen Einschulung selbstständig Schlittschuhlaufen lernt.
Details zum Roboter

Der Roboter besteht aus einer Büste mit beweglichen Augen, Augenlidern und Augenbrauen. Er nimmt Personen in seiner Umgebung wahr und erkennt besonders hervorstechende Handlungen dank einer Kamera und Bewegungssensoren. Mit geeignetem Blickverhalten und Bewegungen mit hoher Wiedergabetreue reagiert er auf die umliegenden Reize.
Die Entwickler nutzen Mechanismen, die das motorische Verhalten und die Aufmerksamkeit nachahmen, das bei biologischen Systemen beobachtet werden kann. Nach und nach sollen immer komplexere und lebensechte Verhaltensweisen erlernt werden. Das Zusammenspiel der Augen, Augenlider, Augenbrauen und des Halses wird von einer proprietären Software gesteuert, die in einer 100-Hz-Echtzeitschleife arbeitet. Das Robotermädchen Matylda aus dem 3D-Drucker reiste 2018 selbstständig 300 km per Anhalter und lernte dabei einiges dazu.
Die Studie der Forscher trägt den Titel „Realistic and Interactive Robot Gaze“. Darin schreiben sie:
„Wir präsentieren eine allgemeine Architektur, die nicht nur versucht, Blickinteraktionen vom technologischen Standpunkt aus zu erzeugen, sondern auch durch die Linse der Charakteranimation, wo die Wiedergabetreue und die Glaubwürdigkeit der Bewegung von größter Bedeutung ist. Das heißt, wir versuchen, eine Interaktion zu schaffen, die die Illusion des Lebens demonstriert.“
Erkennen – Reagieren – Lernen
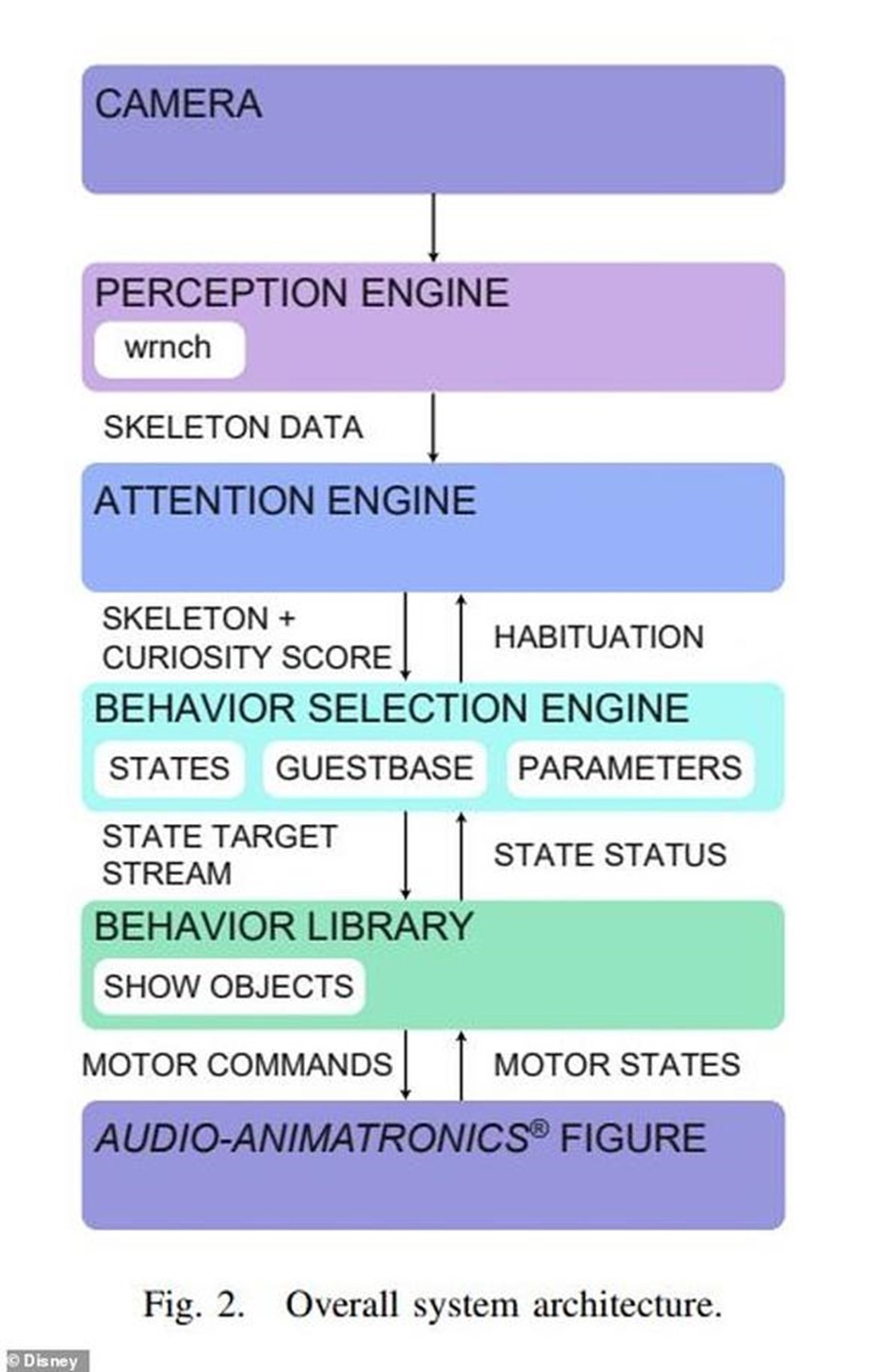
Anhand eines „Neugierde-Scores“ beschließt der Roboter, wie er reagieren wird. Das System erkennt, welche Personen mit dem Roboter interagieren möchten und errechnen das weitere Vorgehen. Das „Behavior Selecton Engine“ steuert das Verhalten des Roboters. Er kann lesen, schauen, aktivieren und bestätigen. Die Informationen zum Gast werden gelöscht, sobald die Person die Szene verlässt. Dadurch soll der Roboter auch besser lernen können, mit den einzelnen Personen zu interagieren.
Eine Subsumtionsarchitektur ermöglicht einfache motorische Bewegungen, um komplexere Verhaltensweisen zu erzeugen. Der Roboter kann so auf hervorstechende Reize in der Umgebung reagieren, indem niedrigere Verhaltensebenen subsumiert werden. Das Ergebnis dieses Systems ist eine interaktive Mensch-Roboter-Erfahrung, die zu menschenähnlichen Blickverhalten fähig ist.
Videovorstellung zur Roboter-Büste
Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.





