
Inhalt:
![]() Forscher des Computational Robotics Lab am Institut für Informatik der ETH Zürich haben mithilfe des zweiarmigen Roboter YuMi IRB 14000 aufwendige Modelle aus Polystyrolschaum erstellt ohne physischen Kontakt mit dem Material. 2018 erreichen Forscher der ETH Zürich und des MIT mit 3D-Druck komplexer Konstruktionsweisen maximale Steifigkeit von Körpern aus Leichtbaumaterialien
Forscher des Computational Robotics Lab am Institut für Informatik der ETH Zürich haben mithilfe des zweiarmigen Roboter YuMi IRB 14000 aufwendige Modelle aus Polystyrolschaum erstellt ohne physischen Kontakt mit dem Material. 2018 erreichen Forscher der ETH Zürich und des MIT mit 3D-Druck komplexer Konstruktionsweisen maximale Steifigkeit von Körpern aus Leichtbaumaterialien
Heißdrahtschneiden bei Styropor
Polystrol (auch bekannt als Styropor) mit heißen Drähten zu zerschneiden ist zeitaufwendig und erfordert eine Verfeinerung mit anderen Werkzeugen. Normalerweise werden dafür gerade, heiße Drähte eingesetzt, die zwar einen sauberen Schnitt liefern, dafür aber keine komplexen Geometrien ermöglichen. 2016 versuchten dänische Forscher erstmals das Heißdrahtschneiden gekrümmter Oberflächen mit einem einzigen Durchlauf zu erzeugen. Die Schweizer Forscher erklärten, dass dabei das Schneidmesser planar bleiben müsste, und das System für nicht triviale Probleme Benutzereingaben benötigte.
Details zum kollaborativen Roboter YuMi IRB 14000
Der zweiarmige kollaborative Roboter YuMi IRB 14000 soll einen effizienteren Prozess ermöglichen. An jedem Ende des Gliedes befindet sich dazu ein nicht dehnbarer elastischer Metallstab, der seine „Hände“ mit sieben Graden bewegt. Das verleiht ihm eine ausgezeichnete Geschicklichkeit und erlaubt präzise 3D-Designs.
Steht die Zielform fest, generiert die Software des Roboters eine Reihe von Trajektoren, um den Schnitt zu erstellen. Die Trajektorien ermöglichen ein effizientes Bewegen der Hände und verringern den Unterschied zwischen aktuellem Werkstück und der Zielform. Die Bewegungen werden mit einem sequenziellen Pfadplanungstool vollautomatisch oder benutzergesteuert ausgeführt.
Details zu Simulationsbeispielen und Prototypen

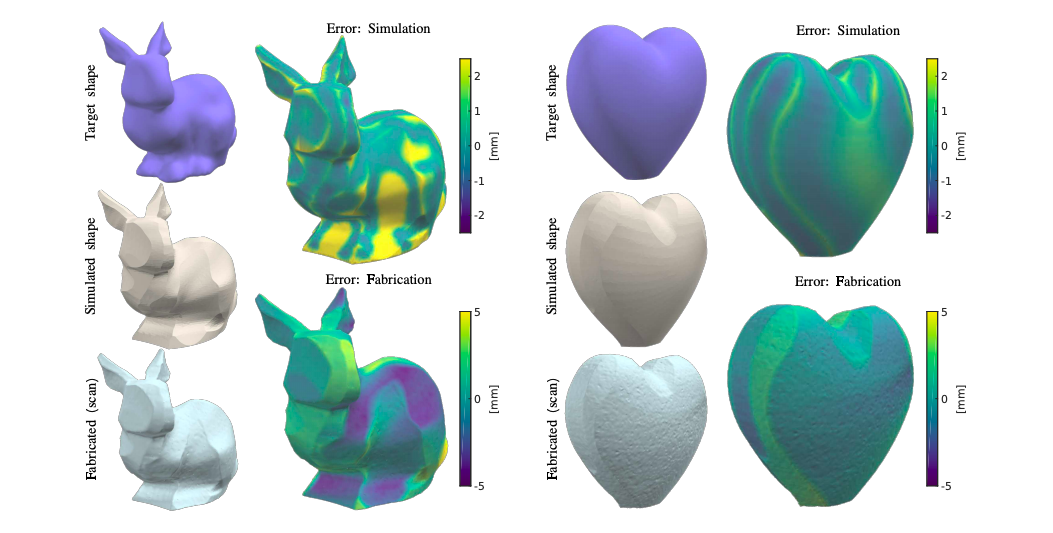
Einige Simulationsbeispiele und Prototypen wurden hergestellt, um die Methode zu bewerten. Ein kubischer Block aus Polystyrolschaum mit der Kantenlänge von 290 mm wurde auf ein Stativ montiert und zwischen den Schnitten manuell gedreht. Eine Hand herzustellen dauerte 4 Stunden, ein Hasenmodell dauerte nur 2 Stunden und 20 Minuten. Es gab mittlere durchschnittliche Fehler im Bereich von 1,97 mm bzw. 0,76 mm beim Hasen und bei einem Herz. Das sei auf den Mangel an Steifheit in den Armen des Roboters und auf die Stativbefestigung zurückzuführen.
Eine höhere Schnittgeschwindigkeit sei durch die Erhöhung der Drahttemperatur zu erreichen. Das würde aber teurer sein und zu verringerter Schnittqualität führen. Alle Ergebnisse veröffentlichten die Forscher in ihrer Arbeit mit dem Titel „RoboCut: Heißdrahtschneiden mit robotergesteuerten flexiblen Stäben“.
Videovorstellung der Arbeit
Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.





